- 스캔된 3D 객체를 다른 스캔 또는 참조 메쉬와 정렬합니다.
- 3D 스캔과 골든 샘플 또는 참조 메쉬 간의 국소적 거리를 계산합니다.
- 잘못 배치된 특징, 기하학적 왜곡, 틈, 돌출부 등의 이상 현상을 감지합니다.
- 포인트 클라우드, 깊이 맵 또는 높이 맵을 생성하는 모든 3D 센서와 호환됩니다.
설명
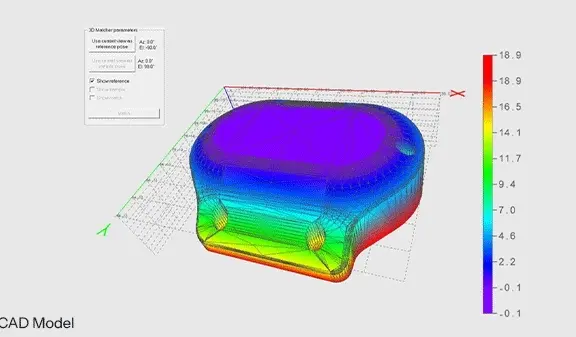
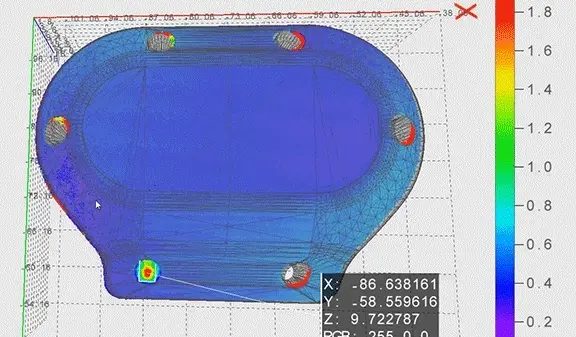
참조 모델과의 3D 데이터 비교를 통한 이상 탐지
3D 데이터를 기준 모델과 정렬한 후, Easy3DMatch는 구멍, 돌기, 흠집, 틈새 등과 같은 국부적 불일치를 검색할 수 있습니다. 검출된 이상 현상의 목록은 각각의 위치, 거리 및 면적과 함께 반환됩니다. 거리 정보와 색상 데이터가 포함된 새로운 포인트 클라우드는 대화형 Open eVision 3D 뷰어를 통해 생성 및 표시될 수 있습니다.
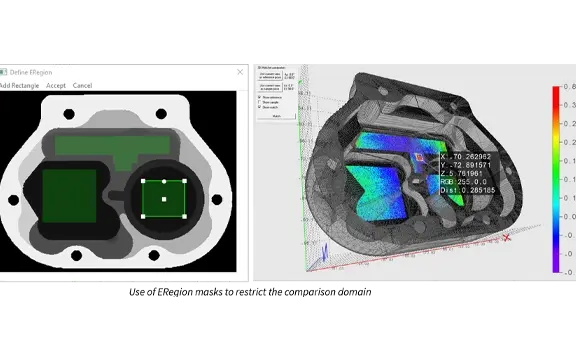
관심 영역의 2차원 및 3차원 부분 영역 지원
임의의 2D 영역(ZMaps 상) 및 3D 볼륨(점 구름 상)을 사용하여 관심 하위 영역을 정의할 수 있습니다. 이 경우 정렬 과정에서는 전체 객체가 사용되지만, 비교 및 이상 탐지 시에는 일부 영역만 고려됩니다.

3D 센서와의 호환성
Easy3D 라이브러리는 Automation Technology, Azure Kinect, Benano, Heliotis, IDS Ensenso, Intel Realsense, Lucid Helios, LMI Gocator, Mech-Mind, Nerian Ruby, Photoneo PhoXi, Shenzhen SinceVision (SSZN), Zivid 등 타사 3D 센서의 데이터를 가져올 수 있습니다. 포인트 클라우드와 Z맵을 효율적으로 관리하여 3D 처리 및 분석을 수행할 수 있습니다.
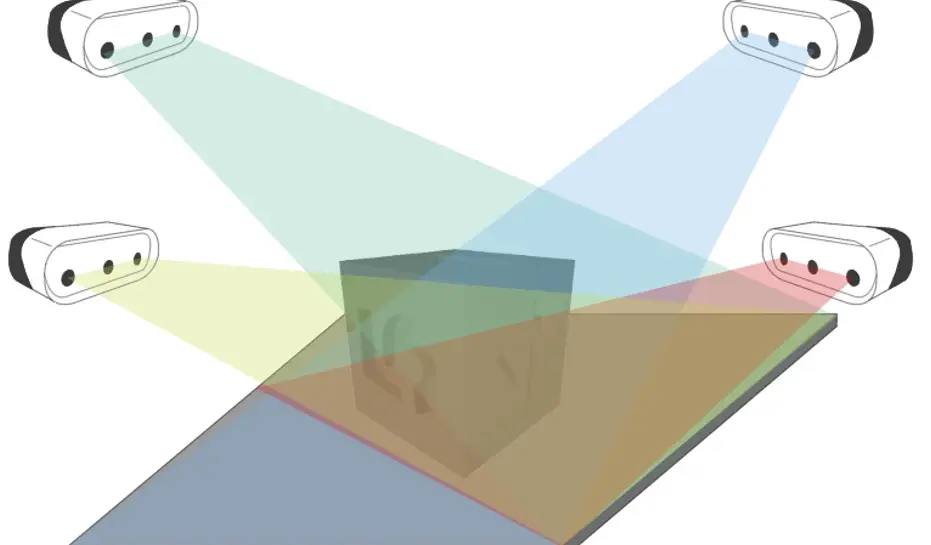
3D 센서 융합
3D 센서 융합은 동일 물체의 서로 다른 면에 대한 포인트 클라우드를 통합하는 기능을 제공합니다. 여러 위치에 배치된 다수의 3D 센서를 사용하여 한 번에 전체 물체를 획득할 수 있습니다. 이 과정은 보정 단계와 병합 단계로 나뉩니다. 그 결과 병합 속도가 빠르며, 획득하려는 물체와 무관하게 보정이 이루어집니다. 마지막으로 이 절차는 중복 점이 제거되고 병합된 클라우드의 모든 속성(색상, 법선 등)이 보존된 최적화된 포인트 클라우드를 생성합니다.
3D 뷰어
Easy3D의 3D 뷰어 클래스를 사용하여 대화형 3D 디스플레이를 생성하십시오. 3D 뷰어는 포인트 클라우드와 3D 객체를 표시할 수 있습니다. OpenGL 인터페이스를 사용하며 호환되는 디스플레이 장치가 필요합니다.
기타 혜택
네오 라이선싱 시스템
네오는 새로운 라이선싱 시스템입니다. 신뢰할 수 있고 최첨단이며, 이제 Open eVision 및 eGrabber 라이선스를 저장할 수 있습니다. 네오를 사용하면 라이선스를 활성화할 위치를 선택할 수 있습니다. 네오 동글에서 활성화하거나 네오 소프트웨어 컨테이너에서 활성화할 수 있습니다. 라이선스를 구매한 후 나중에 결정하면 됩니다.
네오 동글은 견고한 하드웨어를 제공하며 컴퓨터 간 이동이 가능합니다. 네오 소프트웨어 컨테이너는 전용 하드웨어가 필요하지 않으며, 활성화된 컴퓨터에 연결됩니다.
Neo는 자체 전용 Neo 라이선스 관리자를 함께 제공합니다. 이 관리자는 두 가지 형태로 제공됩니다: 직관적이고 사용하기 쉬운 그래픽 사용자 인터페이스(GUI)와 Neo 라이선싱 절차를 쉽게 자동화할 수 있는 명령줄 인터페이스(CLI)입니다.
Windows 및 Linux용 모든 Open eVision 라이브러리
- Microsoft Windows 11, 10 for x86-64 (64비트) 프로세서 아키텍처
- x86_64 시스템용 Microsoft Windows 11, 10 IoT Enterprise
- x86-64(64비트) 및 ARMv8-A(64비트) 프로세서 아키텍처용 Linux (glibc 버전 2.18 이상)

Open eVision 3D Studio
Open eVision 3D Studio는 Open eVision의 3D 평가 및 프로토타이핑 애플리케이션 도구입니다. Open eVision
3D Studio 애플리케이션은 Coaxlink Quad 3D-LLE 프레임 그래버와 Easy3D 및 Easy3DLaserLine 라이브러리를 사용하여 단일 및 이중 3D 레이저 라인 검사 시스템의 구성을 획기적으로 간소화합니다.
Open eVision 3D Studio는 무료이며 라이선스가 필요하지 않습니다.
Software
- Host PC Operating System
-
Open eVision is a set of 64-bit libraries that require an Intel compatible processor with the SSE4 instruction set or an ARMv8-A compatible processor.
Open eVision can be used on the following operating systems:
Microsoft Windows 11, 10 for x86-64 (64-bit) processor architecture
Microsoft Windows 11, 10 IoT Enterprise for x86-64 systems
Linux for x86-64 (64-bit) and ARMv8-A (64-bit) processor architectures with a glibc version greater or equal to 2.18
Remote connections
Remote connections are allowed using remote desktop, TeamViewer or any other similar software.
Virtual machines
Virtual machines are supported. Microsoft Hyper-V, Oracle VirtualBox and libvirt hypervisors have been successfully tested.
Only the Neo Licensing System is compatible with virtualization.
Minimum requirements:
2 GB RAM to run an Open eVision application
8 GB RAM to compile an Open eVision application
Between 100 MB and 2 GB free hard disk space for libraries, depending on selected options.
- APIs
-
Supported programming languages :
The Open eVision libraries and tools support C++, Python and the programming languages compatible with the .NET (C#, VB.NET)
C++ requirements: A compiler compatible with the C++ 11 standard is required to use Open eVision
Python requirements: Python 3.11 or later is required to use the Python bindings for Open eVision
.NET requirements: .NET framework 4.8 (or later) or the .NET platform 6.0 (or later) are supported
Supported Integrated Development Environments:
Microsoft Visual Studio 2017 (C++, C#, VB .NET, C++/CLI)
Microsoft Visual Studio 2019 (C++, C#, VB .NET, C++/CLI)
Microsoft Visual Studio 2022 (C++, C#, VB .NET, C++/CLI)
QtCreator 4.15 with Qt 5.12
Ordering Information
- Product status
-
Released
- Product code - Description
-
PC4184 Open Easy3DMatch for USB dongle
PC4334 Open eVision Easy3DMatch
- Included libraries
-
Easy3D
Easy3DMatch
- Related products
-
PC6512 eVision/Open eVision USB Dongle (empty)
PC6514 Neo USB Dongle (empty)