- 포인트 클라우드 처리 및 관리
- 유연한 ZMap 생성
- 포인트 클라우드 자르기, 감산, 피팅 및 정렬을 위한 3D 처리 기능
- 다양한 3D 센서와 호환
- 3D 뷰어를 통한 대화형 3D 디스플레이
설명
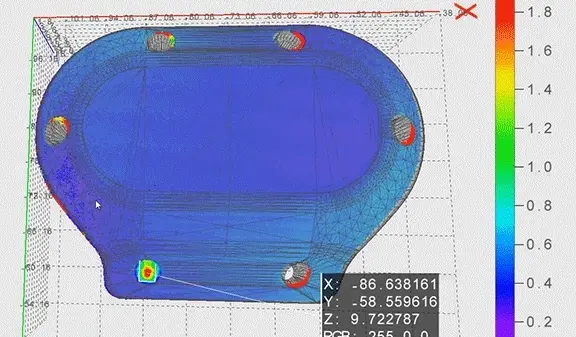
점군 처리
보정 후 3D 포인트 클라우드는 실제 3D 좌표계를 사용한 왜곡 없는 데이터를 포함합니다. 좌표 변환, 포인트 클라우드 자르기 및 간격 조정, 평면 찾기 및 피팅 또는 부품 정렬과 같은 Easy3D 기능을 사용하여 3D 포인트 클라우드를 처리하십시오.

3D 센서와의 호환성
Easy3D 라이브러리는 Automation Technology, Azure Kinect, Benano, Heliotis, IDS Ensenso, Intel Realsense, Lucid Helios, LMI Gocator, Mech-Mind, Nerian Ruby, Photoneo PhoXi, Shenzhen SinceVision (SSZN), Zivid 등 타사 3D 센서의 데이터를 가져올 수 있습니다. 포인트 클라우드와 Z맵을 효율적으로 관리하여 3D 처리 및 분석을 수행할 수 있습니다.
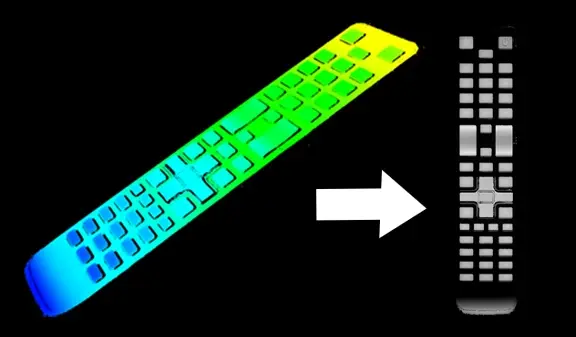
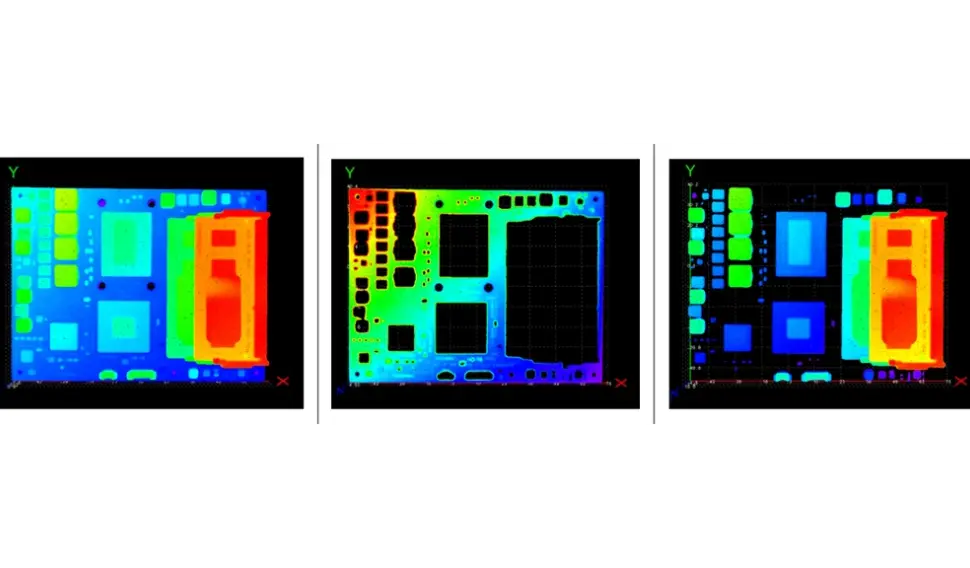
ZMap 생성
Z맵은 점 클라우드를 기준 평면에 투영한 것으로, 거리가 픽셀 그레이스케일 값으로 저장됩니다. Z맵은 왜곡이 없으며, 계량 좌표계를 사용합니다. Easy3D는 이러한 ZMap을 생성하는 기능을 제공합니다. 더 중요한 것은 모든 Open eVision 2D 처리 기능을 ZMap에 적용할 수 있다는 점입니다: EasyImage를 통한 필터링 및 임계값 처리, EasyObject를 통한 블롭 분석, EasyGauge를 통한 서브 픽셀 측정, EasyFind 및 EasyMatch를 통한 패턴 매칭 등이 가능합니다.
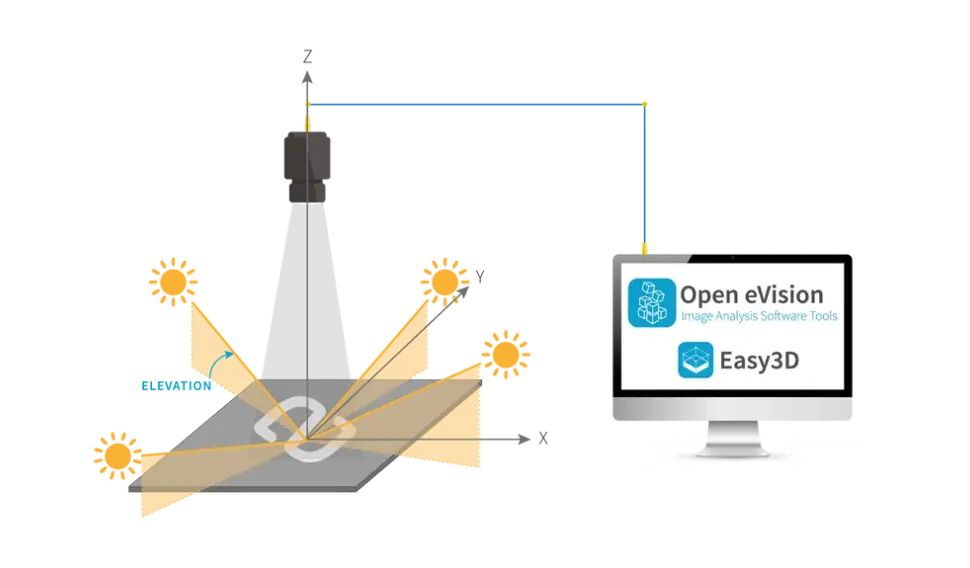
광도계 스테레오를 이용한 3차원 표면 검사
광도계 스테레오 기능은 동일한 표면을 단일 시점에서 촬영한 여러 장의 이미지를 획득하되, 서로 다른 방향에서 조명을 가함으로써 표면의 각 지점에 대한 방향과 반사율을 추정합니다. 이 방법은 단일 카메라-조명 조합으로는 식별할 수 없는 물체 표면의 세부 사항(결함 또는 정보) 검사에 적합하며, 표면 곡률이나 질감의 미세한 변이를 드러냅니다. 다음과 같은 다른 라이브러리의 전처리 단계로 활용될 수 있습니다:
- 코드 판독: EasyMatrixCode, EasyQRCode 또는 EasyBarCode
- 광학 문자 인식: EasyOCR
- 정렬: EasyMatch, EasyFind
- 측정: EasyGauge
- 결함 탐지: EasyObject, EasySegment
광도계 스테레오는 Easy3D 라이브러리에서 사용할 수 있습니다.
3D 뷰어
Easy3D의 3D 뷰어 클래스를 사용하여 대화형 3D 디스플레이를 생성하십시오. 3D 뷰어는 포인트 클라우드와 3D 객체를 표시할 수 있습니다. OpenGL 인터페이스를 사용하며 호환되는 디스플레이 장치가 필요합니다.
기타 혜택
네오 라이선싱 시스템
네오는 새로운 라이선싱 시스템입니다. 신뢰할 수 있고 최첨단이며, 이제 Open eVision 및 eGrabber 라이선스를 저장할 수 있습니다. 네오를 사용하면 라이선스를 활성화할 위치를 선택할 수 있습니다. 네오 동글에서 활성화하거나 네오 소프트웨어 컨테이너에서 활성화할 수 있습니다. 라이선스를 구매한 후 나중에 결정하면 됩니다.
네오 동글은 견고한 하드웨어를 제공하며 컴퓨터 간 이동이 가능합니다. 네오 소프트웨어 컨테이너는 전용 하드웨어가 필요하지 않으며, 활성화된 컴퓨터에 연결됩니다.
Neo는 자체 전용 Neo 라이선스 관리자를 함께 제공합니다. 이 관리자는 두 가지 형태로 제공됩니다: 직관적이고 사용하기 쉬운 그래픽 사용자 인터페이스(GUI)와 Neo 라이선싱 절차를 쉽게 자동화할 수 있는 명령줄 인터페이스(CLI)입니다.
Windows 및 Linux용 모든 Open eVision 라이브러리
- Microsoft Windows 11, 10 for x86-64 (64비트) 프로세서 아키텍처
- x86_64 시스템용 Microsoft Windows 11, 10 IoT Enterprise
- x86-64(64비트) 및 ARMv8-A(64비트) 프로세서 아키텍처용 Linux (glibc 버전 2.18 이상)

Open eVision 3D Studio
Open eVision 3D Studio는 Open eVision의 3D 평가 및 프로토타이핑 애플리케이션 도구입니다. Open eVision
3D Studio 애플리케이션은 Coaxlink Quad 3D-LLE 프레임 그래버와 Easy3D 및 Easy3DLaserLine 라이브러리를 사용하여 단일 및 이중 3D 레이저 라인 검사 시스템의 구성을 획기적으로 간소화합니다.
Open eVision 3D Studio는 무료이며 라이선스가 필요하지 않습니다.
Software
- Host PC Operating System
-
Open eVision is a set of 64-bit libraries that require an Intel compatible processor with the SSE4 instruction set or an ARMv8-A compatible processor.
Open eVision can be used on the following operating systems:
Microsoft Windows 11, 10 for x86-64 (64-bit) processor architecture
Microsoft Windows 11, 10 IoT Enterprise for x86-64 systems
Linux for x86-64 (64-bit) and ARMv8-A (64-bit) processor architectures with a glibc version greater or equal to 2.18
Remote connections
Remote connections are allowed using remote desktop, TeamViewer or any other similar software.
Virtual machines
Virtual machines are supported. Microsoft Hyper-V, Oracle VirtualBox and libvirt hypervisors have been successfully tested.
Only the Neo Licensing System is compatible with virtualization.
Minimum requirements:
2 GB RAM to run an Open eVision application
8 GB RAM to compile an Open eVision application
Between 100 MB and 2 GB free hard disk space for libraries, depending on selected options.
- APIs
-
Supported programming languages :
The Open eVision libraries and tools support C++, Python and the programming languages compatible with the .NET (C#, VB.NET)
C++ requirements: A compiler compatible with the C++ 11 standard is required to use Open eVision
Python requirements: Python 3.11 or later is required to use the Python bindings for Open eVision
.NET requirements: .NET framework 4.8 (or later) or the .NET platform 6.0 (or later) are supported
Supported Integrated Development Environments:
Microsoft Visual Studio 2017 (C++, C#, VB .NET, C++/CLI)
Microsoft Visual Studio 2019 (C++, C#, VB .NET, C++/CLI)
Microsoft Visual Studio 2022 (C++, C#, VB .NET, C++/CLI)
QtCreator 4.15 with Qt 5.12
Ordering Information
- Product status
-
Released
- Product code - Description
-
PC4181 Open Easy3D for USB dongle
PC4331 Open eVision Easy3D
- Related products
-
PC1637 Coaxlink Quad 3D-LLE
PC6512 eVision/Open eVision USB Dongle (empty)
PC6514 Neo USB Dongle (empty)