- Align a scanned 3D object with another scan or with a reference mesh
- Compute the local distances between 3D scans and a golden sample or reference mesh
- Detect anomalies such as misplaced features, geometric distortions, gaps, bumps,...
- Compatible with all 3D sensors that produce point clouds, depth maps or height maps
Description
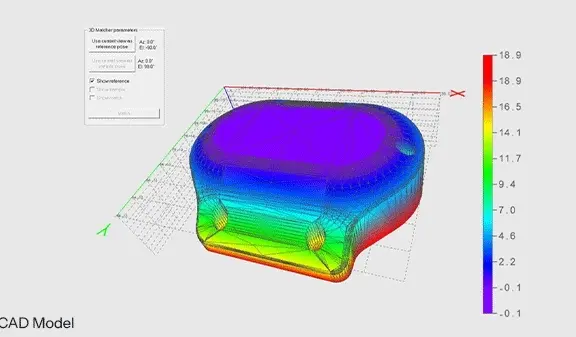
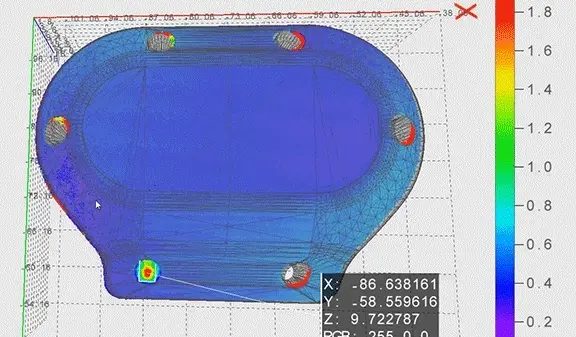
Anomaly Detection By Comparing 3D Data With A Reference Model
After the alignment of the 3D data with the reference model, Easy3DMatch can search for local discrepancies, like holes, bumps, scratches, gaps… The list of detected anomalies is returned along with their individual position, distance and area. New point clouds with distances and colored data can be generated and displayed by the interactive Open eVision 3D viewer.
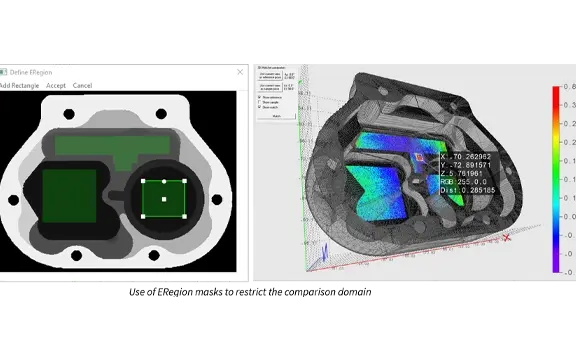
Support 2D And 3D Subdomains Of Interest
Arbitrary 2D regions (on ZMaps) and 3D volumes (on point clouds) can be used to define subdomains of interest. In this case, the whole object is used during the alignment process, but only some parts are taken into account for comparison and anomaly detection.

Compatibility With 3D Sensors
The Easy3D library is able to import data from third-party 3D sensors from Automation Technology, Azure Kinect, Benano, Heliotis, IDS Ensenso, Intel Realsense, Lucid Helios, LMI Gocator, Mech-Mind, Nerian Ruby, Photoneo PhoXi, Shenzhen SinceVision (SSZN), Zivid and others. Point Clouds and ZMaps are managed efficiently and allow 3D processing and analysis to be performed.
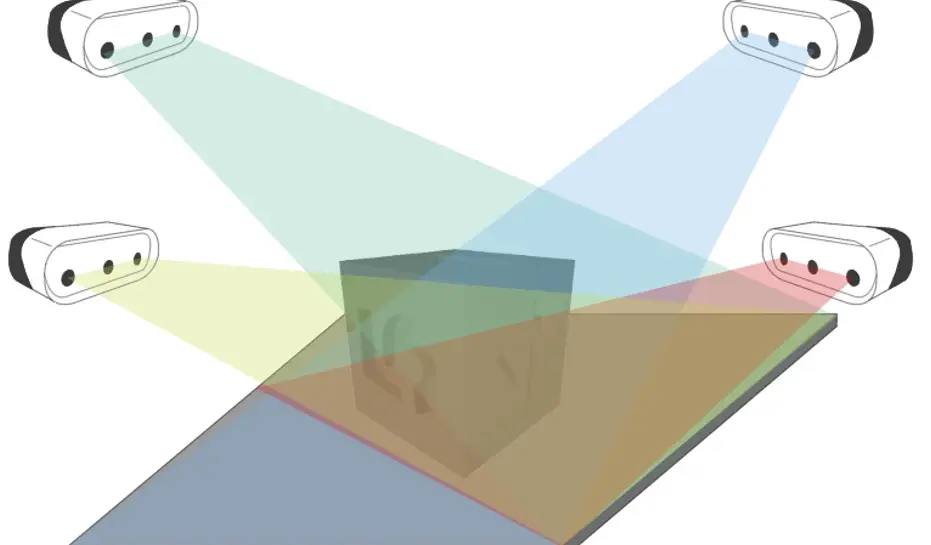
3DSensor Fusion
3DSensor Fusion is a functionality enabling the merger of point clouds of the same object’s different faces. You can use a number of 3D sensors placed at multiple positions to acquire a complete object at once. The process is split between a calibration phase and a merging phase. As a result, the merger is fast and the calibration is independent of the objects you wish to acquire. Finally, this procedure produces optimized point clouds where duplicate points have been removed and all attributes (colors, normals,…) of the merged clouds are preserved.
3D Viewer
Use the 3D Viewer class of Easy3D to create an interactive 3D display. The 3D Viewer can display point clouds and 3D objects. It uses the OpenGL interface and requires a compatible display device.
Other Benefits
Neo Licensing System
Neo is the new Licensing System. It is reliable, state-of-the-art, and is now available to store Open eVision and eGrabber licenses. Neo allows you to choose where to activate your licenses, either on a Neo Dongle or in a Neo Software Container. You buy a license, you decide later.
Neo Dongles offer a sturdy hardware and provide the flexibility to be transferred from a computer to another. Neo Software Containers do not need any dedicated hardware, and instead are linked to the computer on which they have been activated.
Neo ships with its own, dedicated Neo License Manager which comes in two flavours: an intuitive, easy to use, Graphical User Interface and a Command Line Interface that allows for easy automation of Neo licensing procedures.
All Open eVision Libraries For Windows And Linux
- Microsoft Windows 11, 10 for x86-64 (64-bit) processor architecture
- Microsoft Windows 11, 10 IoT Enterprise on x86_64 systems
- Linux for x86-64 (64-bit) and ARMv8-A (64-bit) processor architectures with a glibc version greater or equal to 2.18

Open eVision 3D Studio
Open eVision 3D Studio is the 3D evaluation and prototyping application tool of Open eVision.
The Open eVision 3D Studio application drastically simplifies the configuration of single and dual 3D laser line inspection systems using the Coaxlink Quad 3D-LLE frame grabber, as well as the Easy3D and Easy3DLaserLine libraries.
Open eVision 3D Studio is free and does not require any license.
Software
- Host PC Operating System
-
Open eVision is a set of 64-bit libraries that require an Intel compatible processor with the SSE4 instruction set or an ARMv8-A compatible processor.
Open eVision can be used on the following operating systems:
Microsoft Windows 11, 10 for x86-64 (64-bit) processor architecture
Microsoft Windows 11, 10 IoT Enterprise for x86-64 systems
Linux for x86-64 (64-bit) and ARMv8-A (64-bit) processor architectures with a glibc version greater or equal to 2.18
Remote connections
Remote connections are allowed using remote desktop, TeamViewer or any other similar software.
Virtual machines
Virtual machines are supported. Microsoft Hyper-V, Oracle VirtualBox and libvirt hypervisors have been successfully tested.
Only the Neo Licensing System is compatible with virtualization.
Minimum requirements:
2 GB RAM to run an Open eVision application
8 GB RAM to compile an Open eVision application
Between 100 MB and 2 GB free hard disk space for libraries, depending on selected options.
- APIs
-
Supported programming languages :
The Open eVision libraries and tools support C++, Python and the programming languages compatible with the .NET (C#, VB.NET)
C++ requirements: A compiler compatible with the C++ 11 standard is required to use Open eVision
Python requirements: Python 3.11 or later is required to use the Python bindings for Open eVision
.NET requirements: .NET framework 4.8 (or later) or the .NET platform 6.0 (or later) are supported
Supported Integrated Development Environments:
Microsoft Visual Studio 2017 (C++, C#, VB .NET, C++/CLI)
Microsoft Visual Studio 2019 (C++, C#, VB .NET, C++/CLI)
Microsoft Visual Studio 2022 (C++, C#, VB .NET, C++/CLI)
QtCreator 4.15 with Qt 5.12
Ordering Information
- Product status
-
Released
- Product code - Description
-
PC4184 Open Easy3DMatch for USB dongle
PC4334 Open eVision Easy3DMatch
- Included libraries
-
Easy3D
Easy3DMatch
- Related products
-
PC6512 eVision/Open eVision USB Dongle (empty)
PC6514 Neo USB Dongle (empty)